INTROVERTEBRATE
精妙地结合机械动力学和受未开发的海洋领域启发的仿生学。
关于
项目团队:Elaine Wang & Damon Chen
导师:Daniel Rozin
年份:2023年秋季
地点:ITP纽约大学,纽约市
描述
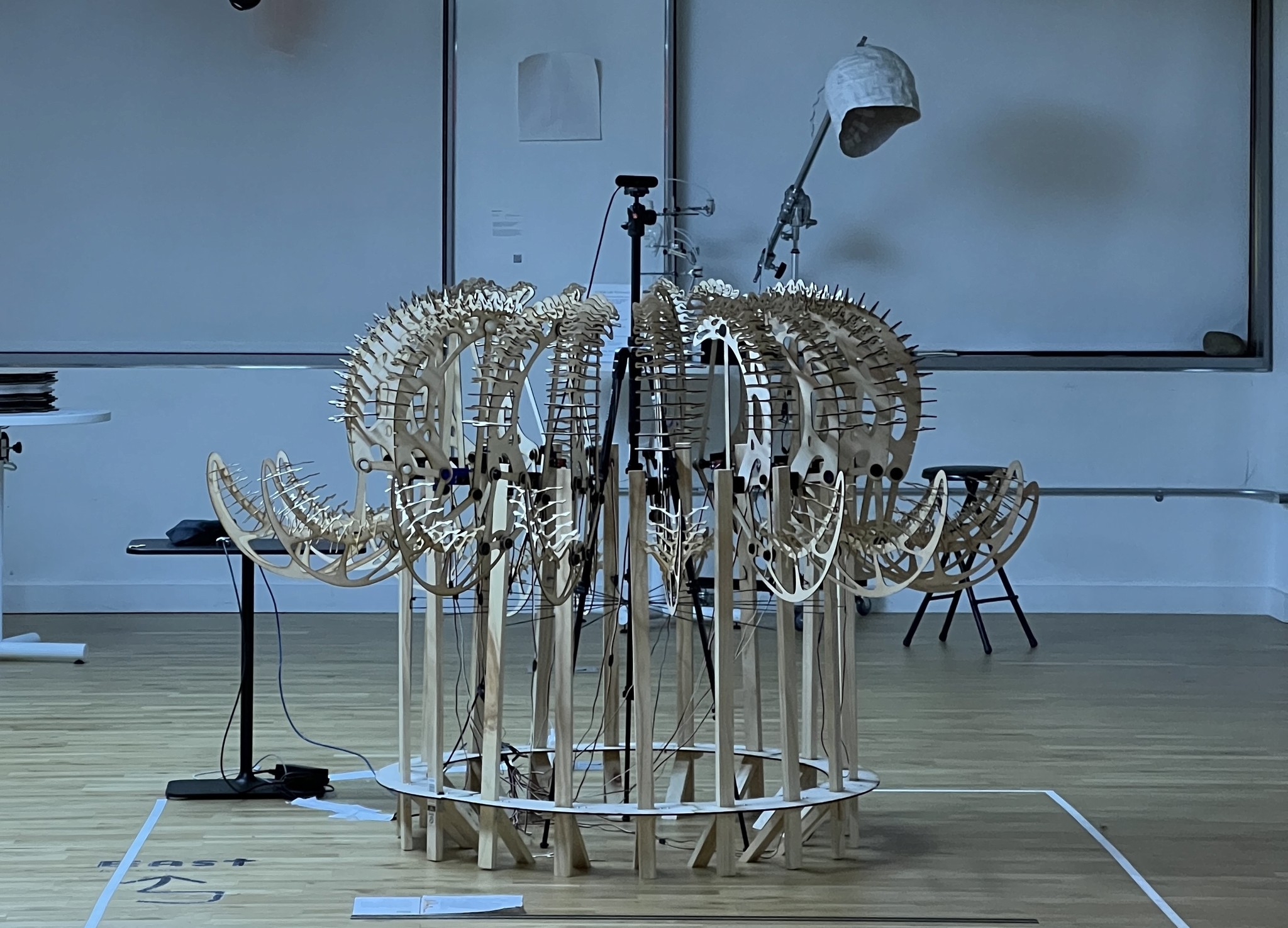
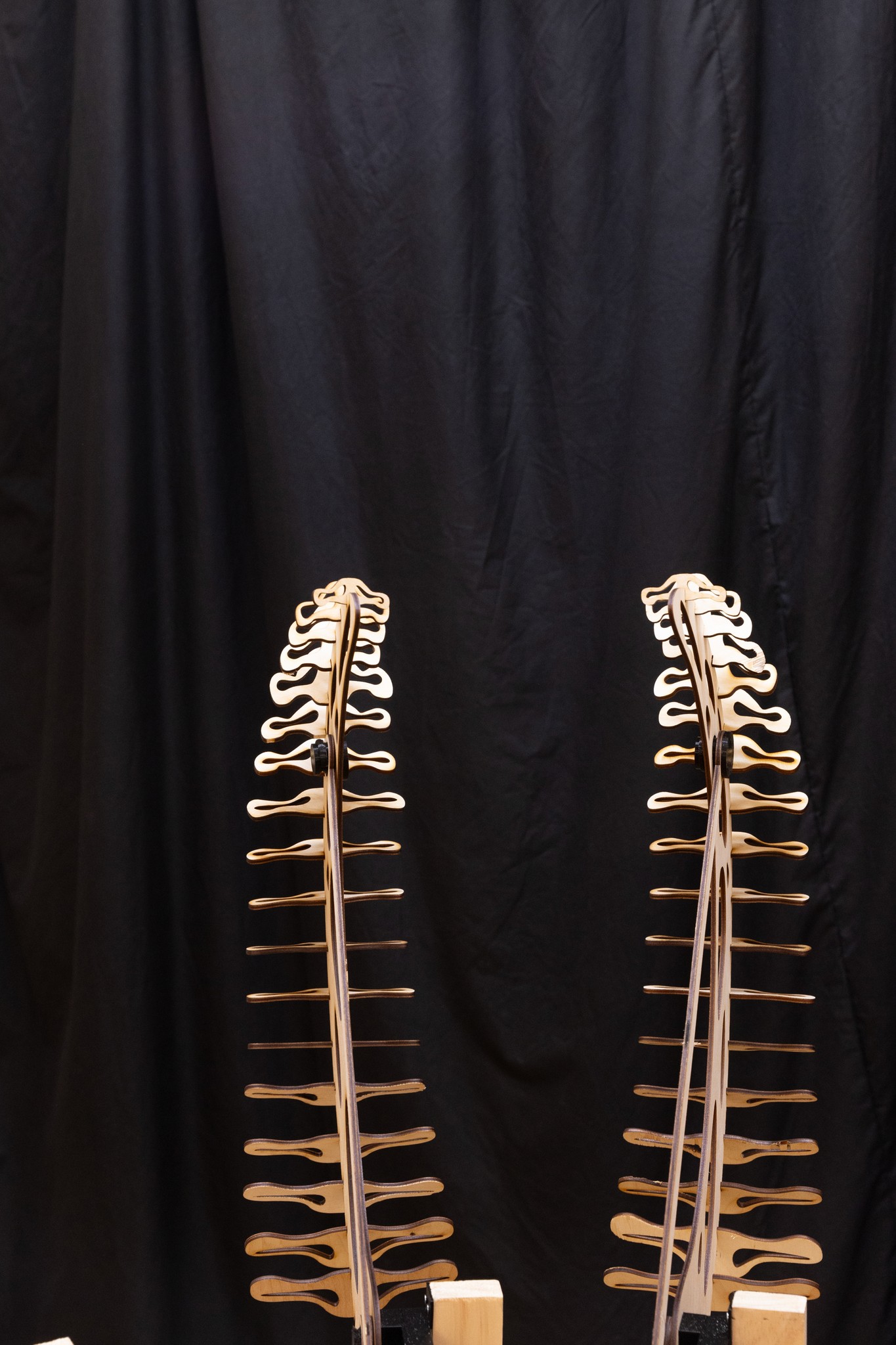
Introvertebrate是一个模拟机械动力学的装置。我们使用电机驱动杠杆,实现骨骼结构的一系列规律运动。我们受到了海洋未知地区的启发。人类探索的海域仅占整个地球海域的30%。我们坚信在未知海域一定存在着特殊生物的世界。我们尝试结合不同海洋动物的骨骼结构,如鲸鱼和海马,以及水母的运动方式,从而创造出独特的生物结构。
灵感
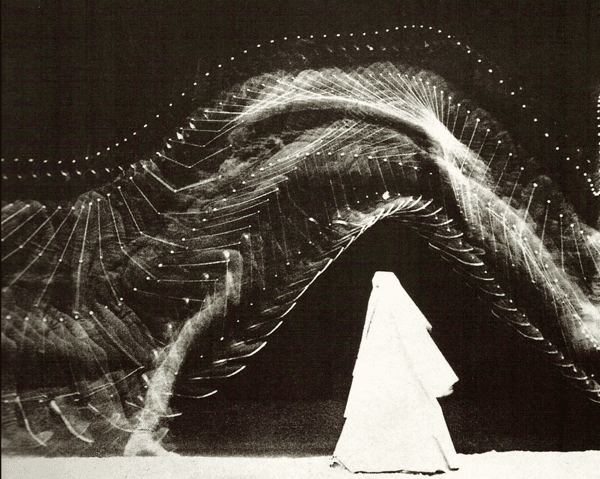
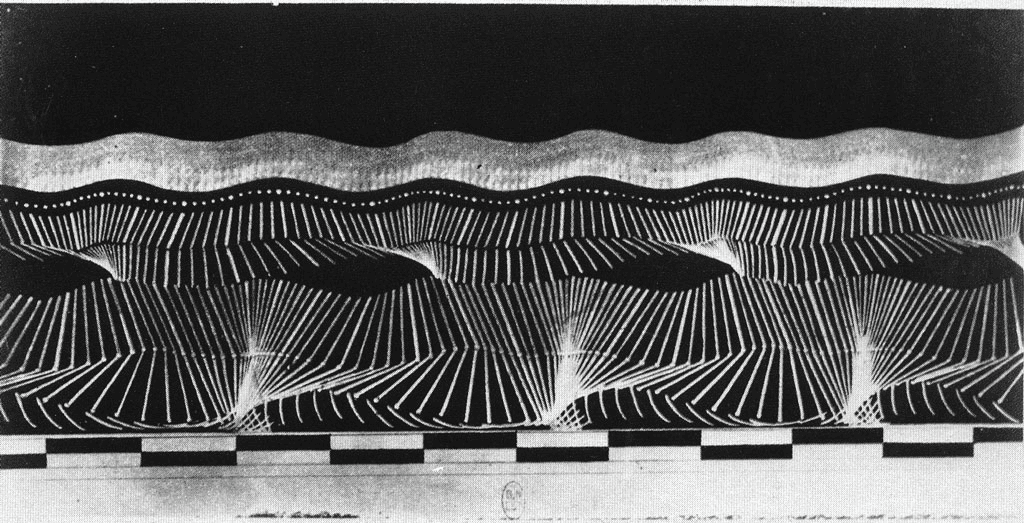
光绘,或称光绘画,在拍摄时利用长曝光和以某种方式使用光线使其在图片中累积的技术。
Étienne-Jules Marey和Georges Demeny,1889:Marey和Demeny开发了几种摄影技术来研究人类到马等一切事物的运动;127年前,光绘首次用于科学研究(请参阅左侧的照片)。
结构
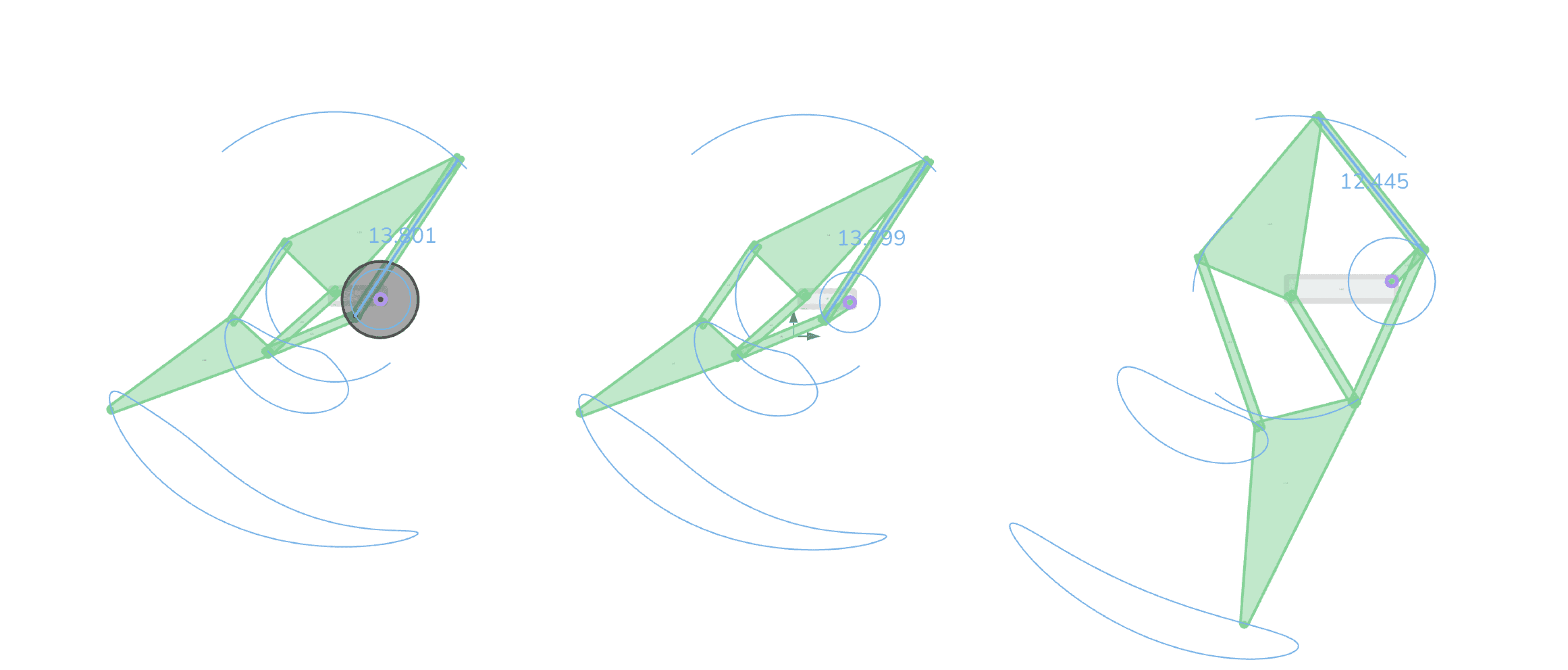
联结件是许多机械装置中不可或缺的部分。它们可以用于改变方向、改变速度和改变运动部件的时序。
通过利用运动生成,我们精妙地模拟动物骨骼的微妙运动。见证骨骼结构如何无缝地转化为杠杆,精准高效地驱动整个机械腿。
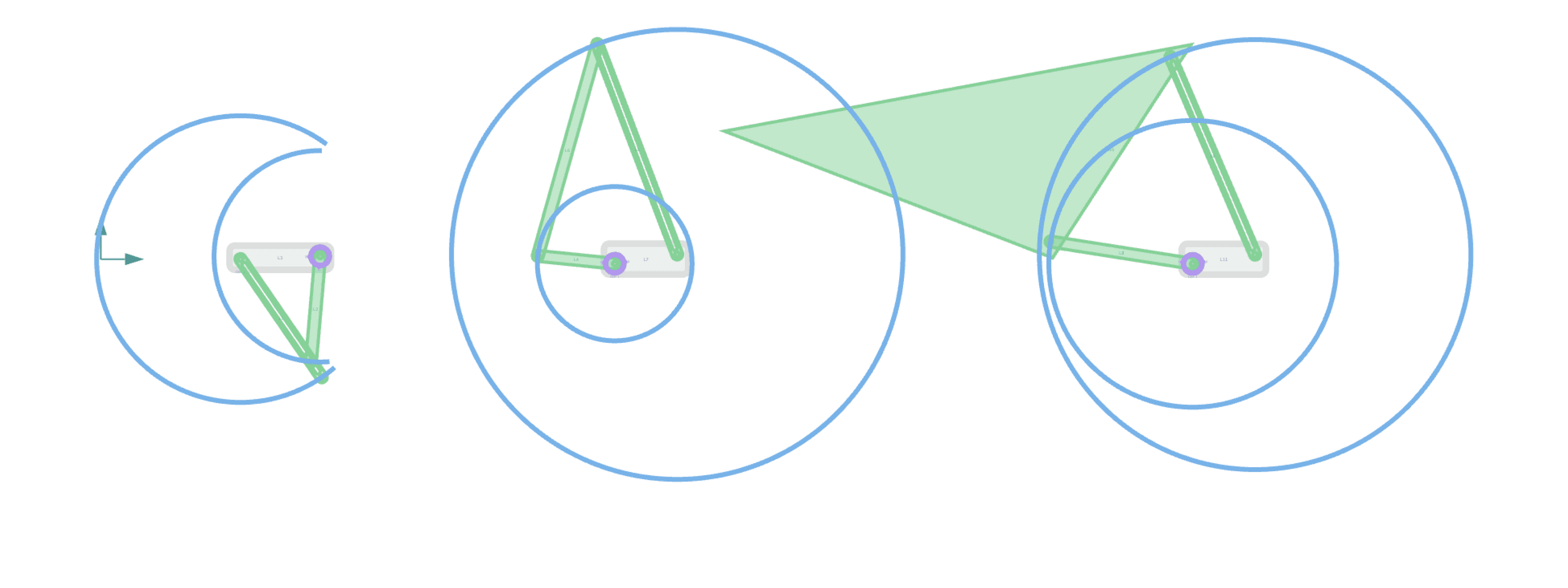
设计特点包括18个机器腿,电机排列成一个圆圈,形成骨骼运动的重复性。
技术说明
我们使用Arduino连接两个电机驱动器。在用普通舵机测试代码后,我们将电机更换为20kg电机。我们使用for循环将代码的运动编辑成类似波浪的循环。当一个电机运动时,下一个电机将在一秒后继续运动。
用户情景
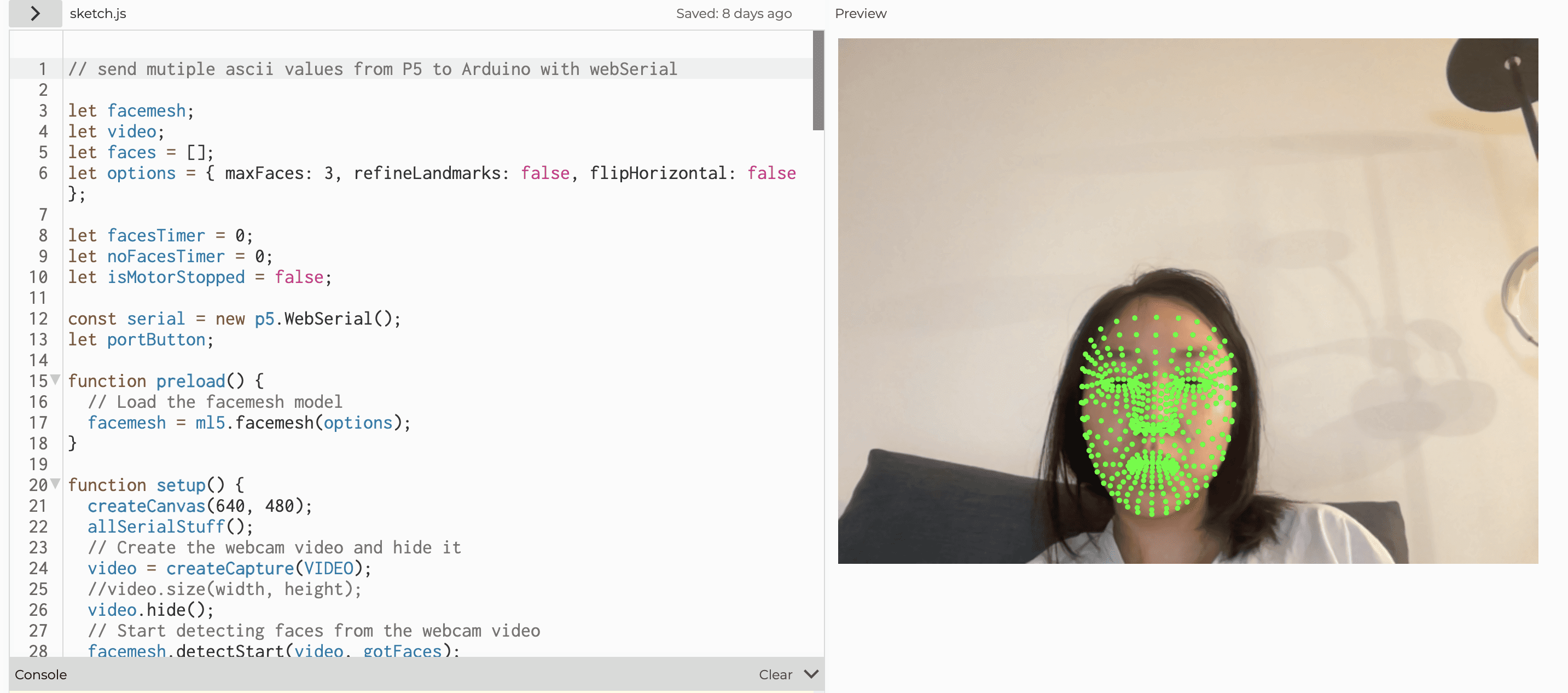
利用P5 FaceNet技术,我们巧妙地检测到人脸。一旦察觉到一个接近的人,生物将采取防御性的反应,表现为独特的摇晃动作以保护自己。这一整合展示了面部识别和响应行为的动态交汇,创造了互动丰富的体验。





我们打算如何在将来开发这个项目?
展望未来,我们设想拓展Dynamic Skeleton的应用。除了其艺术和教育方面,我们还在探索在科学研究和娱乐方面的潜在合作。我们相信这项技术有着未被开发的潜力,并致力于拓展其边界。此外,我们愿意接受反馈和合作,希望根据更广泛社区的见解和想法推动项目的发展。